


具有视觉系统的工业机器人的应用
李福明 李有弟 李晓东
河南安彩高科股份有限公司 河南安阳 455000
摘 要:工业机器人其研发及应用是衡量一个国家科技创新、高端制造发展水平的重要标志。特别是国家在提出中国制造2025以后,工业机器人在现代工业领域的应用越来越广,对未来工业产品的升级换代具有重要意义。机器视觉系统通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状、颜色等的判别,在现代工业领域具有广泛的应用。在工业机器人的基础上通过集成新的视觉系统,形成新的具有视觉系统的工业机器人,既是原设备的延伸也是一种创新的应用。在工业应用方面,特别是在玻璃行业的应用,有着极其重要的影响。
关键词: 机器人 视觉系统 精雕机 应用
1. 开发目的
在现代工业化生产过程中,特别是人力成本增加的基础上,机器换人成新的趋势。本文通过对国产广州数控RB20搬运机器人(以下简称广数机器人)集成机器视觉在精雕机上的应用,实现对精雕机的自动装载、卸载和加工后产品按加工质量分类存放的要求,验证具有视觉系统的广数机器人的应用的可行性,最终满足工业自动化流水线生产需求,实现机器换人的目的。通过具有视觉系统广数机器人在精雕机上的应用,能够实现以下目的:
第一,通过具有视觉系统广数机器人在精雕机上的应用,可以验证国产机器人在工业领域使用的效率、精度和使用过程中的可靠性。验证国产机器人是否能够取代进口机器人,满足批量化生产的需求的目标,从而可以大大提高生产效率和生产的自动化程度。
第二,通过具有视觉系统广数机器人在精雕机上的应用,可以提高技术人员的研发技术水平,锻炼和提高技术人员二次开发的能力。同时可以验证视觉系统的稳定性和可行性,以及和国产机器人集成的通用性。通过项目的推进和经验的积累,为公司发展新的项目做技术储备。
第三,通过具有视觉系统广数机器人在精雕机上的应用,可以有效满足一些不适合于人工作业的危险工作环境或不适合人员连续作业难以满足要求的场合,为保证工人人身安全和权益,提供了可靠的保障。同时也为公司长远发展,实现机器换人的大趋势做项目准备。
当前,随着我国劳动力成本快速上涨,人口红利逐渐消失,生产方式向柔性、智能、精细转变,构建以智能制造为根本特征的新型制造体系迫在眉睫,对工业机器人的需求将呈现大幅增长。因此,探讨具有视觉系统广数机器人在精雕机上的应有也具有深远意义。
2. 开发原理
机器人既是先进制造业的关键支撑装备,也是改善人类生活方式的重要切入点。机器视觉伴随计算机技术、现场总线技术的发展,技术日臻成熟,已是现代加工制造业不可或缺的产品。通过广数机器人在精雕机的应用开发,不但具有广阔的应用前景,还能产生良好的社会效益。采用的通讯模式,通过视觉系统将精雕机的工艺信号传递给机器人控制器,从而使机器人在最快的时间内进行响应,完成精雕机的工艺要求,同时对加工后的产品进行检验达到分类存放的目的,减少人工强度和人员使用。设计原理图如图一所示:
图一:设计原理图
3. 开发过程
使用实验室广数机器人,通过集成的视觉系统传递的信号信息,配合精雕机赋予工艺需求信号和工位位置信号,满足具有视觉系统广数机器人给精雕机进行精准装载和卸载、对产品分类存放的目的,实现精雕机可以在无人状态下连续生产的要求。通过具有视觉系统的广数机器人在精雕机上的应用,实现技术人进行程序二次开发和集成视觉系统应用的目的。要实现以上要求,主要包括以下几个系统:
3.1精雕机系统
精雕机是加工手机盖板玻璃的核心设备,能否给精雕机进行精准装载和卸载超薄玻璃,是精雕机能否平稳运行和连续的生产的基本要求,是能否加工出合格产品的重要前提。精雕机开始工作之前需要将载片台上的玻璃进行定位,定位后形成真空将所需要加工的玻璃进行固定。真空形成后,刀头下降,开始对玻璃进行钻孔加工。加工完成后,刀头上升,载片台后退,真空释放,进行卸载下片,一个工作流程结束。精雕机分为两个工位,分别是一工位和二工位。本应用以具有视觉系统广数机器人配合精雕机两个工位为例进行阐述。
3.2广数机器人系统
广数机器人是比较有代表性的国产机器人,其主要由吸盘、示教器、控制柜和本体等部分组成。要满足具有视觉系统广数机器人在精雕机上的应用,要处理好以下几个方面:
3.2.1吸盘
机器人吸盘是机器人组成的重要部位,吸盘的好坏决定系统的稳定性,生产的连续性和产品的优良性。因为精雕机加工的是超薄玻璃,是用在手机上面。因此必须保证吸盘不能对玻璃表面形成污染,同时还要保证气密性,以满足吸取玻璃的需求。
3.2.2试教
国产机器人编程方式一般分为离线编程和试教模式。离线编程软件一般需要另外付费购买,同时也不算很成熟,因此国产机器人大部分还是使用试教模式进行编程。对机器人进行试教是通过示教器(也叫手操器)来完成的,同时示教器也是编程的主要载体。对机器人进行操作都需要通过示教器来完成,通过示教器对机器人位置进行试教,其实也是编程的过程。在试教过程一定要设置安全位置,当机器人进行点对点位置移动时,如果不设置安全位置很有可能发生意外事故,不能保证设备的安全运行。
3.2.3信号处理
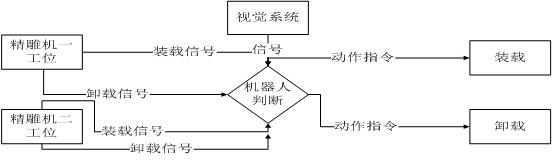
信号处理是具有视觉系统广数机器人在精雕机上应用的核心的步骤。前面说到精雕机具有两个工位。开机时,通过装载在精雕机两个工位上的CCD摄像头,经过信号采集,通过系统判断。如果两个工位都是空的,都向机器人发出装载信号,系统会默认为一工位优先装载。一工位完成以后,继续给二工位进行装载。装载完成机器人退回到等待位置,等待下一步指令。当一工位满足卸载要求时就会给机器人一个装载信号,机器人就将玻璃从精雕机进行卸载。并根据CCD摄像机采集到图片,经过视觉系统对比、分析,判定加工产品是废品还是良品放置到不同产品存放区域内,同时再次吸取玻璃给精雕机进行装载。当二工位卸载信号传递给机器人的时候机器人就对二工位玻璃进行卸载,并分类存放,然后依次循环,实现连续生产的目的。当精雕机一工位信号和二工位信号同时满足要求的时候,一工位的优先级大于二工位的优先级。其程序处理截图如图二所示:

图二:机器人程序图
3.3工业机器视觉系统
机器视觉伴随计算机技术、现场总线技术的发展,技术日臻成熟,已是现代加工制造业不可或缺的产品。在工业机器视觉系统选取的过程中,要处理好以下几个方面:
3.3.1光源
照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉光源照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。本系统采用LED灯光作为机器视觉的光源。
3.3.2 CCD摄像机
CCD是一种半导体成像器件,具有灵敏度高、抗强光、畸变小、体积小、寿命长,抗震动等优点。它的工作方式是将被摄物体的图像经过镜头聚焦到CCD芯片上,CCD根据光的强弱积累相应比例的电荷,各个像素积累的电荷在视频时序的控制下,逐点外移,经视频捕捉卡滤波、放大处理,A/D转换后形成视频信号输出。
3.3.3图像采集卡
图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。本系统采用的视频捕捉卡,具有高品质的视频采集性能,具备高速PCI总线,采集频率为3D帧/秒,显示画面流畅不间断。其实物图如图三所示:
图三:视频采集卡实物图
精雕机的工位信息送到CCD摄像头视场内,由成像系统和图像采集卡将图像采集到计算机内部;运用图像处理技术对采集到的原始图像进行预处理,从中提取设计所需的位置特征量;最后运用模式识别技术对取到的特征量进行整理以完成系统的检测。处理后的特征信息反馈至机器人处理器,由机器人控制器处理后,机器人自动根据图像信息对精雕机进行装载和卸载,从而保证精雕机的自动运行。同时,安装在精雕机上摄像头通过对加工过玻璃进行图像采集,通过系统内部和合格玻璃样品进行对比,判断其是否为良品,从而给机器人信息,让其按照对比结果,分别按良品或废品进行卸载。这样进行卸载后,就可以大大减少工作人员的工作量,减少工序损失和人员数量。视觉系统大致构成图如图四所示:
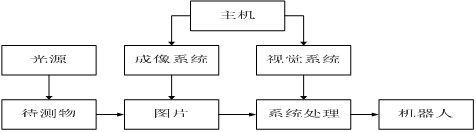
图四:视觉系统组成图
3.4真空系统
真空系统是机器人工作的重要组成部分,是机器人进行装载和卸载不可或缺的动力来源。本应用使用的真空系统源自机器人本体安装的文丘里装置,通过外围管路提供压缩空气,从而为机器人提供真空系统。机器人本体安装有真空阀,通过24VDC电源,根据机器人输出信号控制真空通断。其实物图如下图五所示:

文丘里系统组成图
完成现场所有的电气、机械安装,现场布线,气路连接和控制等工作后。再次对整个安装结果和设计要求对比,对现场设备进行跟踪、测量。确保无误后,在保证安全的情况下,将视觉系统、机器人系统和精雕机系统进行整机联合实验。使具有视觉系统的机器人成为精雕机装载和卸载的载体,能够满足精雕机的使用需求,同时对加工后的产品进行对比、判断,可以直接将产品分类存放,减少人员使用,减轻人员工作量。
4. 效果确认
经过长时间的调试和使用,具有视觉系统广数机器人能够精准的对精雕机所使用的超薄玻璃进行装载和卸载,并且无误差的对加工后的产品进行分类存放,位置精度也能够满足精雕机的使用要求。同时,经过连续的装载和卸载,并进行长时间的运转试验满足了精雕机的使用需要,验证了具有视觉系统广数机器人在精雕机使用上的可行性,也验证了国产机器人集成视觉系统的可行性,达到了设计的目的。通过此设计对工业自动化生产线使用,提供了可靠的参考价值,对连续稳定生产以及未来降低人员使用上具有借鉴意义。
5. 结束语
通过具有视觉系统广数机器人在精雕机上的应用,实现技术人员对广数机器人进行二次开发和集成视觉应用的目标,验证了国产机器人,满足精度、效率、使用频率、故障率等方面的使用要求以及国产机器人集成视觉系统的可行性。能够完成各种复杂的动作和工艺特性。通过该机器人集成视觉系统的应用,锻炼了技术人员的技术水平,促进了技术积累。机器人的程序开发再利用以及集成视觉系统的应用,对于工厂自动化技术水平的提高,对生产现场的机器人以及集成视觉系统的机器人使用、推广应有具有很好的指导作用。
【参 考 文 献】
【1】《工业机器人GR-C控制系统操作说明书》[M] 广州数控设备有限公司
【2】《广数机器人维修保养手册》 [M] 广州数控设备有限公司
【3】《广数RB20搬运机器人电气分册使用说明书》[M] 广州数控设备有限公司
【4】栾创业,王冬青,王伟 基于CP1H型PLC的通信监控网络方案设计[J]机械工程与自化2008(10)
【5】《恩迪检测控制700-2精雕机使用手册》[M] 上海恩迪检测控制技术有限公司
【6】胡小峰,赵辉,Visual C++/Matlab图像处理与识别实用案例精选[M],人民邮电出版社,2004年9月第1版
【7】王庆友,CCD应用技术[M],天津大学出版社,2000
作者简介
李福明 LI FU MING 1981年4月4日 男 河南新乡 工程师 工学学士 毕业后主要从事电气设备研究和开发,负责部门和玻璃行业相关的小型电气设备的研究、设计和开发。主要应用于光伏玻璃、浮法玻璃等相关玻璃的镀膜技术,以及和新型镀膜玻璃相关的设备技术储备。对国产机器人和进口机器人具有一定应用和开发经验。河南安彩高科股份有限公司(股票代码600207) 河南省安阳市中州路南段 河南安彩高科股份有限公司 邮编455000 固话+86 (0) 372 3733846 手机15137229154 传真+86 (0) 372 3932808邮箱:yfzx48@acbc.com.cn

